Bipedal Automated Rickshaw Design - (MAJOR-Project for MECE-2310)
Mechanical walking prototype exploring bipedal locomotion for human-free load pulling.


Introduction
The team outlines the project’s dual goals: to explore the purpose and history of rickshaws, and to design and prototype a functional, innovative bipedal mechanism using SolidWorks CAD and physical construction methods.

Purpose & Functions of Rickshaw
Rickshaws have historically served as a low-cost mode of urban transport, especially in Asian cities. The team reimagines this familiar concept as an autonomous mechanical walker, designed for modern utility and adaptability.

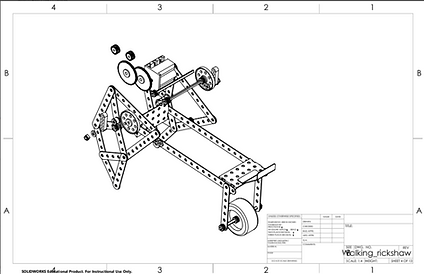
SolidWorks CAD Prototype
Showcases the virtual design model of the bipedal rickshaw, featuring key assemblies, components, and motion mechanisms developed in SolidWorks to simulate structural behavior and mechanical function.

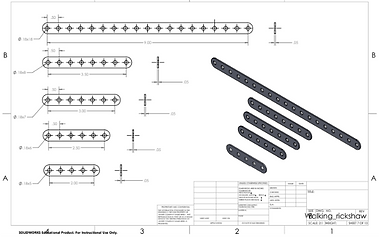
SolidWorks CAD Prototype Views
Detailed part drawings of the prototype are provided to document dimensions, tolerances, and materials, which are essential for guiding the construction of the physical model and supporting manufacturing feasibility.



Design Process (S.P.I.C.E.)
Using the SPICE framework, the team breaks down the design journey: defining the situation and problem, investigating customer needs and mechanical feasibility, and building multiple prototypes to refine the concept despite part and budget limitations.
Bill of Materials (B.O.M.)
The BOM lists all essential components required for the physical prototype, offering insights into material selection, cost tracking, and procurement planning for the project.

Gantt
Chart

Conclusion
Despite facing challenges like budget constraints and limited working components, the team successfully developed a working prototype of a bipedal rickshaw mechanism and gained a deeper understanding of both its traditional role and innovative potential.