Manual CNC Arm Manipulator Design (MAJOR-Project for MECE 3030U)
Ergonomic 3D-printed lifting arm designed for safer machinist workflows.
Motivation and Design Targets
The motivation behind this project was to design a manual arm manipulator to assist machinists in lifting heavy components such as chuck jaws, large machined parts, and bulk tools. The goal was to create a low-cost, space-efficient solution tailored for smaller shops, offering intuitive, user-friendly operation without the complexity of powered systems. Unlike fixed floor-mounted units, the arm is designed to mount directly to the CNC machine door and fold away when not in use, allowing for customization based on user needs and maximizing workspace flexibility.
The design goals of the project were to enable the 1:5 scale prototype to lift parts ranging from 5 to 25 lbs with ease, while minimizing the need for machined components. The design focused on optimizing shapes and curves to ensure 3D printed materials could meet the strength requirements, and aimed to achieve 3 degrees of freedom (DOF) for smooth and functional operation.


New Functionality and Mechanism


What's New ?!
Our design features easily modifiable components, including interchangeable grippers and dampeners, allowing for quick customization based on task requirements. It also incorporates gas springs, sourced from Amazon, to facilitate smooth motion and load handling. The structure is built using lightweight yet durable PLA material, making it suitable for 3D printing while maintaining strength and flexibility.
The design incorporates new handle clasps that allow for easy assembly and disassembly, optimizing floor space and enabling a single arm to be used across multiple machines. This fully manual manipulator leverages human feedback for control, proving more effective than complex control systems while reducing the need for extensive testing and optimization. The mechanism supports 3 degrees of freedom (DOF) during operation, even under load, ensuring flexibility and efficiency.
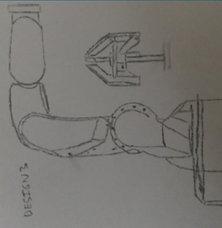
Conceptual Sketches
The following were discarded for the final design:
-
Lumbar support
-
Gripper
-
Rotating Joint(s)
-
Singular Door Holder
-
Multiple Handlebars
-
Multiple Pneumatics elements

Various Components' Initial Sketches



Clamps
Gripper

Univesal
Joint


Assembly Motion Simulation

FORCE POLYGON GRAPHING FOR SIMULATION ON SIMENS NX
Finite Element Analysis (FEA)
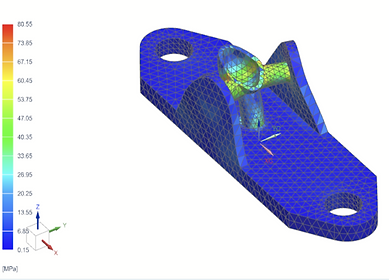
Damper Joint

Universal Joint Base

Gripper (Old Version)

Clamp

Triangular Joint Mount

New Gripper Housing
Computer Aided Manufacturing (CAM) Simulation

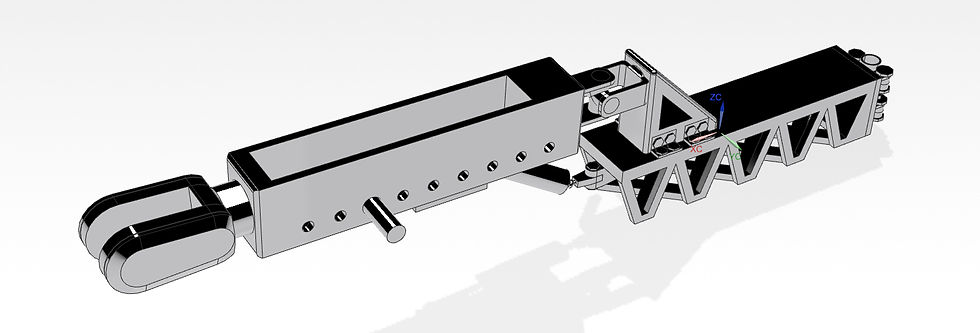
Prototype Assemblies




Cost Analysis
While developing the CNC Arm Manipulator, one of our primary goals was to create an affordable and practical tool for small-to-medium-sized machine shops—businesses that often lack the budget for high-end, floor-mounted industrial arms costing several thousands of dollars.
We conducted a comprehensive cost analysis across different manufacturing scenarios and materials:
Prototype (PLA, 3D Printed)
-
Material: PLA (1.22 g/cm³ density)
-
Total Weight (Estimated): ~1.5 kg
-
Material Cost: $22/kg → $33
-
Machine Cost (Bambu Lab X1-Carbon): $699 CAD
-
Labor Cost: $0 (self-manufactured by our team)
-
Miscellaneous (Gas Spring, Screws, etc.): $21.50
-
Total Estimated Prototype Cost: $1,094.99 CAD
Production (Aluminum 6061, CNC Milled)
-
Material: Aluminum 6061 (2.7 g/cm³ density)
-
Machining Operations: Face milling, contour milling, drilling
-
Average CNC Cycle Time: 3 hours per part (13 total parts)
-
Labor Cost: $22/hr × 3 hrs/part = $66/part
-
Tooling + Machine Cost (Haas 3-axis VMC, CAM software): ~$400,000
-
Manufacturing Cost per Arm: $1,082.45 CAD
Competitor Comparison:
-
3Arm / FlexArm Products: ~$6,000 CAD+
-
Our Arm: ~$1,095 (PLA prototype) or ~$1,082 (machined Al version)

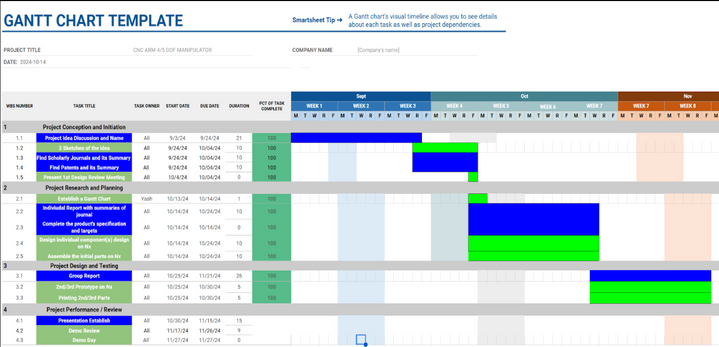
Gantt
Chart